1.通用的深度优先搜索
vertex增加两个属性
- discovery 发现时间,第几步访问到并被设置为灰色
- finish 结束时间,第几步结束探索并被设置为黑色
graph 增加一个属性
- time 记录算法执行的步骤
方法:类的继承 super
class DFSGraph(Graph):
def __init__(self):
super().__init__() # 继承graph里init里的属性
self.time = 0 # 新增属性 time
def dfs(self):
for aVertex in self:
aVertex.setColor('white')
aVertex.setPred(-1) # 设置前驱顶点
for aVertex in self:
if aVertex.color=="white":
self.dfsvisit(aVertex) # 递归调用
def dfsvisit(self, startVertex):
# 开始探索
startVertex.setColor("grey")
self.time += 1
startVertex.setDiscovery(self.time) # 记录开始的时间
for nextVertex in startVertex.getConnections():
if nextVertex.color=="white": # 对于没有发现过的新顶点
nextVertex.setPred(startVertex) # 设置前驱
self.dfsvisit(nextVertex) # 递归调用
# 结束探索
startVertex.setColor('black')
self.time += 1
startVertex.setFinish(self.time) # 记录结束时间
2.拓扑排序
从“工作流程图”到“工作次序排列”的算法
-
图建立:
- 工作项——节点;工作流程——图
- 一个DAG(有向无圈图【否则循环依赖】),输出顶点的线性序列
- 要求存在边(v,w),则线性序列中v在w之前
-
实现——深度优先搜索DFS
- 调用
3.强连通分支
发现高度聚集节点群
- 图G的子集C,任意两个顶点之间都有路径来回——C是具有这样性质的最大子集
- 找到之后可以对顶点分类合并——简化
图的转置
图的转置代表把图所有有向边的顶点交换次序——图和转置图的强连通分支没有变
Kosaraju 算法
- 首先调用通用DFS计算结束时间
- 对图进行转置,再调用DFS计算,每个顶点的搜索循环按照上一步计算的结束时间倒序来搜索
- 生成深度优先森林,每一棵树都是一个强连通分支
4.最短路径问题(带权重)
例子:路由器连接的网络,负责把信息传递,终端试试“traceroute www....”
- 顶点:路由器;边:网络连接;权重:速度、负载程度、优先级等等因素抽象为权重
- 权重越高,代价越高,希望找到代价最小的路径
DIJKSTRA
一个确定的开始节点到所有图中其他节点的最短路径
- 顶点Vertex类中使用dist 作为实例变量,包含从起点到目的节点的最小权值路线的当前总权值。
- 各顶点先后顺序是由一个优先队列控制的,队列中决定顺序的参量是dist值,初始dist尽可能的大
- 每次最低dist的顶点优先pop出来,计算权重会引起dist的减小——重排
- 重复上述,每一个节点,算法均会重复一次
from pythonds import PriorityQueue, Graph, Vertex
# 最短路径
# G - 无向赋权图
# start - 开始节点
# 返回从开始节点到其它所有节点的最短带权路径
def dijkstra(G, start):
pq = PriorityQueue() # 创建优先队列
start.setDistance(0) # 起点距离设置为0,其它节点距离默认maxsize
# 将节点排入优先队列,start在最前面
pq.buildHeap([(v.getDistance(), v) for v in G])
while not pq.isEmpty():
# 取从start开始距离最小的节点出队列,作为当前节点
# 当前节点已解出最短路径
currentVert = pq.delMin()
# 遍历节点的所有邻接节点
for nextVert in currentVert.getConnections():
# 从当前节点出发,逐个加上邻接节点的距离进行检验
newDist = currentVert.getDistance() \
+ currentVert.getWeight(nextVert)
# 如果小于邻接节点原有距离,就更新邻接节点
#print("{},原距离 = {},新距离 = {}".format(nextVert.getId(), newDist, nextVert.getDistance()))
if newDist < nextVert.getDistance():
# 更新距离值
nextVert.setDistance(newDist)
# 更新返回路径
nextVert.setPred(currentVert)
# 更新优先队列
pq.decreaseKey(nextVert, newDist)
G = Graph()
ndedge = [('u', 'v', 2), ('u', 'w', 5), ('u', 'x', 1), # 边和权重
('v', 'x', 2), ('v', 'w', 3), ('x', 'w', 3),
('x', 'y', 1), ('w', 'y', 1), ('w', 'z', 5),
('y', 'z', 1)]
for nd in ndedge:
G.addEdge(nd[0], nd[1], nd[2])
G.addEdge(nd[1], nd[0], nd[2])
start = G.getVertex('u') # 从u开始
dijkstra(G, start) # 计算从u开始最短路径的权重和
for i in G.getVertices():
print(G.getVertex(i))
u:color white:disc 0:fin 0:dist 0:pred
[None]
v:color white:disc 0:fin 0:dist 2:pred
[u:color white:disc 0:fin 0:dist 0:pred
[None]
]
w:color white:disc 0:fin 0:dist 3:pred
[y:color white:disc 0:fin 0:dist 2:pred
[x:color white:disc 0:fin 0:dist 1:pred
[u:color white:disc 0:fin 0:dist 0:pred
[None]
]
]
]
x:color white:disc 0:fin 0:dist 1:pred
[u:color white:disc 0:fin 0:dist 0:pred
[None]
]
y:color white:disc 0:fin 0:dist 2:pred
[x:color white:disc 0:fin 0:dist 1:pred
[u:color white:disc 0:fin 0:dist 0:pred
[None]
]
]
z:color white:disc 0:fin 0:dist 3:pred
[y:color white:disc 0:fin 0:dist 2:pred
[x:color white:disc 0:fin 0:dist 1:pred
[u:color white:disc 0:fin 0:dist 0:pred
[None]
]
]
]
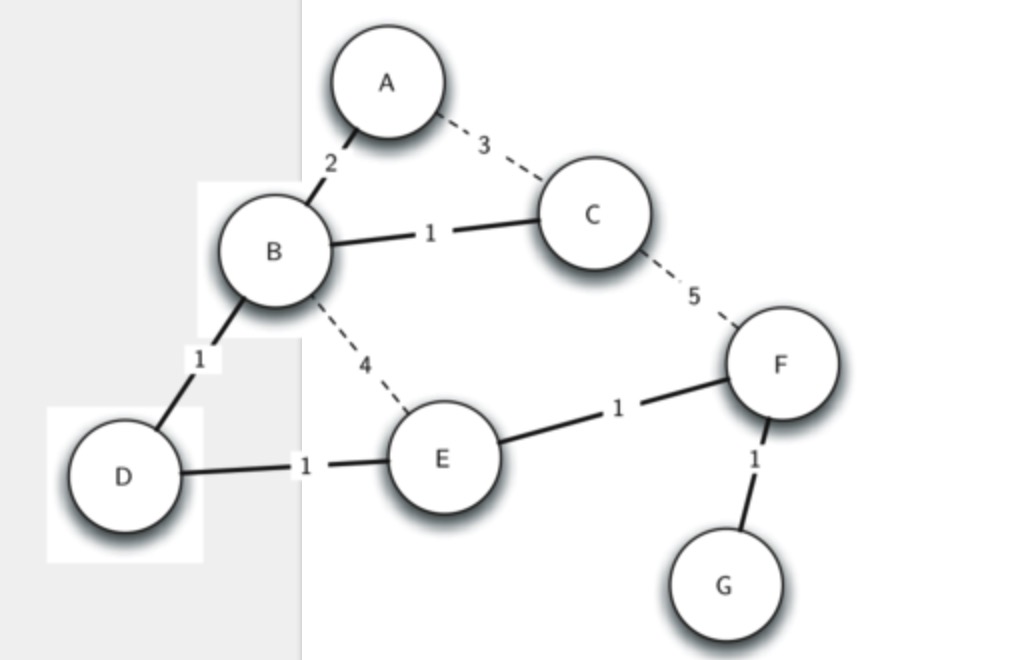
5.最小生成树
信息广播问题,希望覆盖到所有顶点,同时总费用最少
含义
- 生成树:拥有图中所有的顶点和最少的边,仍然保持连通的子图
- 最小生成树:包含图G(v,e)的所有顶点v和E的无圈子集,并且边权重和最小。
Prim
- 贪心算法 每一步都沿着权重最小的边前进搜索,如果还不是生成树则——添加一条最小权重的可以安全添加的边
- 可以安全添加的边:
from pythonds import PriorityQueue, Graph, Vertex
# 最小生成树prim算法
# G - 无向赋权图
# start - 开始节点
# 返回从开始节点创建最小生成树
def prim(G, start):
pq = PriorityQueue() # 创建优先队列
start.setDistance(0) # 起点最小权重代价设置为0,其它节点最小权重代价默认maxsize
# 将节点排入优先队列,start在最前面
pq.buildHeap([(v.getDistance(), v) for v in G])
while not pq.isEmpty():
# 取距离*已有树*最小权重代价的节点出队列,作为当前节点
# 当前节点已解出最小生成树的前驱pred和对应最小权重代价dist
currentVert = pq.delMin()
# 遍历节点的所有邻接节点
for nextVert in currentVert.getConnections():
# 从当前节点出发,逐个检验到邻接节点的权重
newCost = currentVert.getWeight(nextVert)
print((nextVert.id), end = " ")
# 如果邻接节点是"安全边",并且小于邻接节点原有最小权重代价dist,就更新邻接节点
if nextVert in pq and newCost < nextVert.getDistance():
# 更新最小权重代价dist
nextVert.setPred(currentVert)
# 更新返回路径
nextVert.setDistance(newCost)
# 更新优先队列
pq.decreaseKey(nextVert, newCost)
print((nextVert.id, newCost))
G = Graph()
ndedge = [('A', 'B', 2), ('A', 'C', 3), ('B', 'C', 1),
('B', 'D', 1), ('B', 'E', 4), ('C', 'F', 5),
('D', 'E', 1), ('E', 'F', 1), ('F', 'G', 1)]
for nd in ndedge:
G.addEdge(nd[0], nd[1], nd[2])
G.addEdge(nd[1], nd[0], nd[2])
start = G.getVertex('A')
prim(G, start)
B ('B', 2)
C ('C', 3)
A C ('C', 1)
D ('D', 1)
E ('E', 4)
A B F ('F', 5)
B E ('E', 1)
B D F ('F', 1)
C E G ('G', 1)
F